


တိုးတက်သောဇီဝစက်မှုဒီဇိုင်း
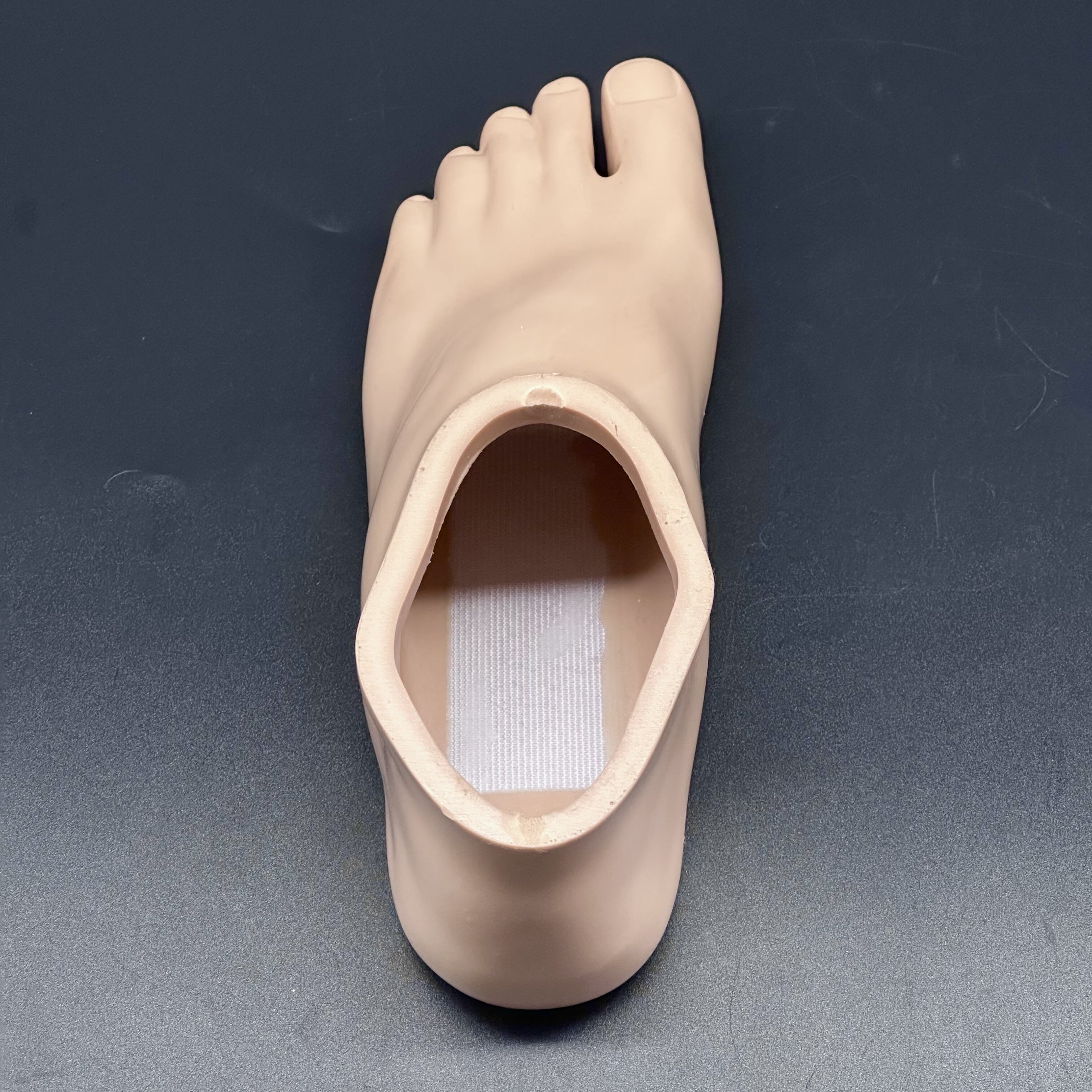
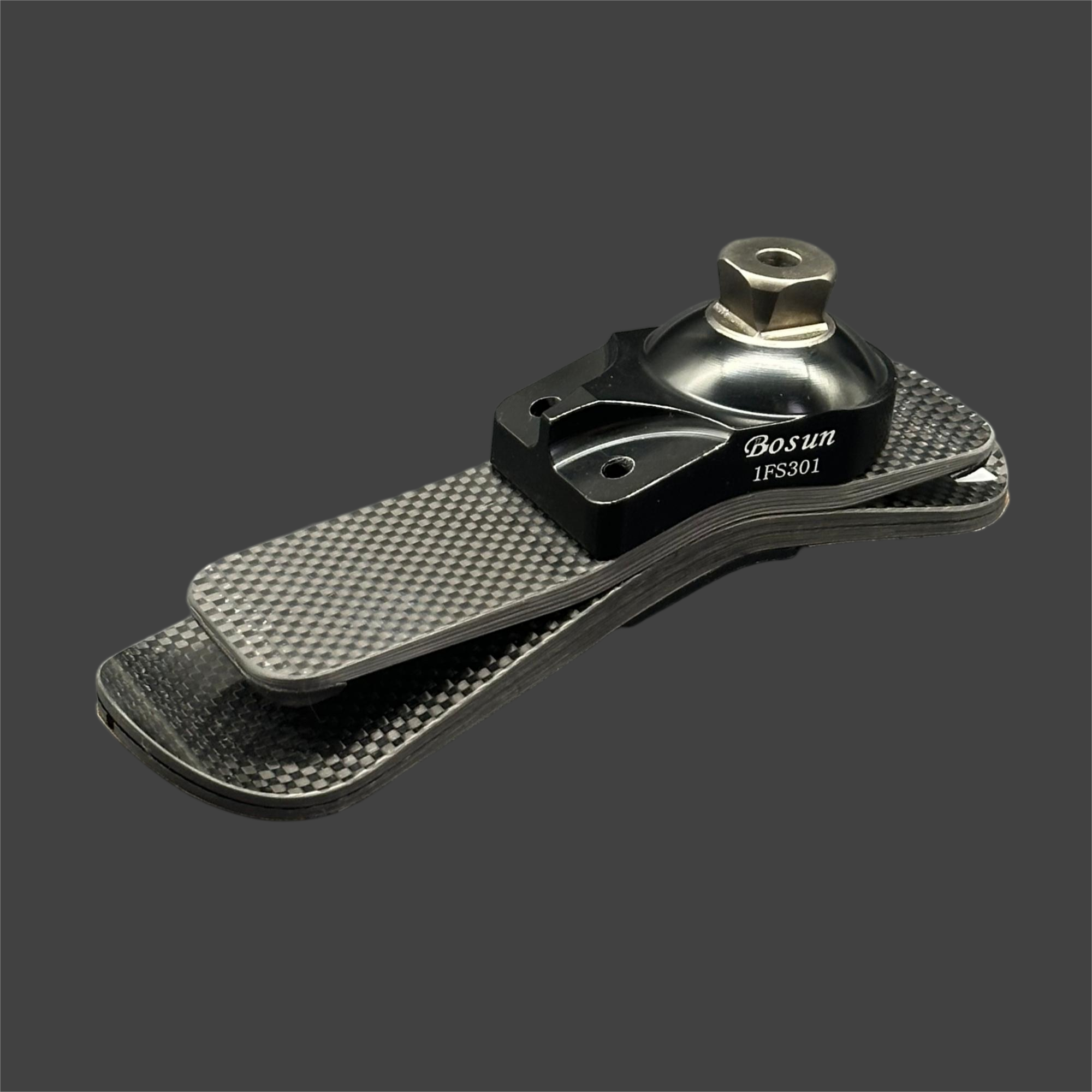
ခြေထောက်၏ နိမ့်ပိုင်းဒီဇိုင်းသည် ပရိုစတက်တစ်၏ လုပ်ဆောင်မှုကို တီထွင်ဖန်တီးပေးသော ဇီဝကမ္မ အခြေခံများကို ပေါင်းစပ်ထားပါသည်။ ၎င်း၏ တီထွင်ထားသော ဒီဇိုင်းတွင် သဘာဝခြေထောက်၏ လှုပ်ရှားမှုကို တိကျစွာ မီမီကူးပြောင်းပေးသော မဲလ်တီ-အက္ခိယ စနစ်ကို ထည့်သွင်းထားပြီး လမ်းလျှောက်စဉ် ကြိတ်ခြင်းဖြစ်စဉ်အတွင်း ပိုမိုချောမွေ့သော ပြောင်းလဲမှုများကို ခံစားရစေပါသည်။ ဖိအားနှင့် အမြန်နှုန်းများကို တုံ့ပြန်မှုပေးရန် အင်ဂျင်နီယာများကို ဖန်တီးထားသော ဖလက်စ်ဇုန်များသည် လှုပ်ရှားမှုများစွာအတွက် တည်ငြိမ်သော လုပ်ဆောင်မှုကို ပေးဆောင်ပါသည်။ ခြေထောက်၏ ဇီဝကမ္မ ထိရောက်မှုကို ၎င်း၏ စွမ်းအင်သိမ်းဆည်းမှုနှင့် ပြန်လည်ရရှိမှု စွမ်းရည်များကို မြှင့်တင်ပေးထားခြင်းဖြင့် လမ်းလျှောက်စဉ်တွင် သဘာဝအားကောင်းမွန်မှုကို ထိန်းသိမ်းပေးပြီး ရွှေ့ပြောင်းရာတွင် လိုအပ်သော စွမ်းအင်ကုန်ကျမှုကို လျော့နည်းစေပါသည်။ ဒီဇိုင်းတွင် အထူးသဖြင့် ဖိအားဖြန့်ဖြူးမှု အထောက်အကူပြုသော အင်္ဂါရပ်များကို ထည့်သွင်းထားပြီး အသားအရေကျန်းမာရေးနှင့် ကျန်းမာရေးကောင်းမွန်မှုကို ထိန်းသိမ်းပေးရန်အတွက် အရေပြားကျန်းမာရေးနှင့် အဆင်ပြေမှုကို တိုက်ရိုက်ကူညီပေးပါသည်။